

Posted by Dolf Broekaart
Table of contents
This weeks blog is about hydrofoiling. One of my personal hobbies is watersports. I love sailing, windsurfing, wakeboarding and other challenging water related balance-sports. Normally I spend my summer in a warm country along the sea, or at least close to it. Due to Covid-19 we will stay in our own country this year, but there is still plenty sea along the shore of Holland. During the lockdown period, I watched some videos during the evening-hours on youtube where hydrofoiling is done for windsurfing & kitesurfing. Although I have never done it myself yet, it seemed a very cool thing to start trying out this summer. Being a Simulation addict, I first wanted to get an impression how difficult this is by virtually assessing the concept of it by use of SIMULIA XFlow CFD.
So my journey started with downloading some models from Grabcad. I have found one from a surfboard and one from a hydrofoil which I have put together in an assembly.
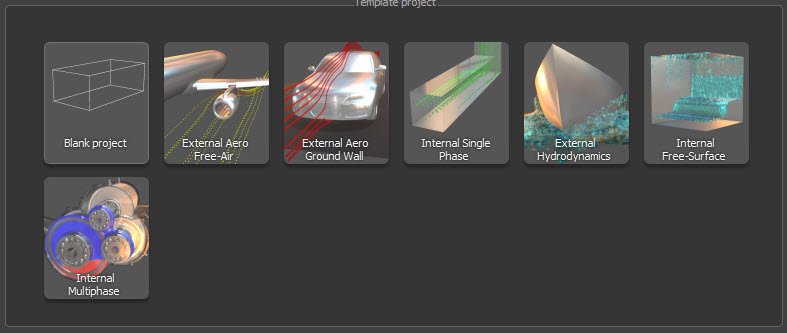
The first thing I have done is to open these files in XFlow CFD by using their STEP-Files. When launching XFlow CFD, the system asks you which type of study you would like to perform. In this case I have chosen External Hydrodynamics.
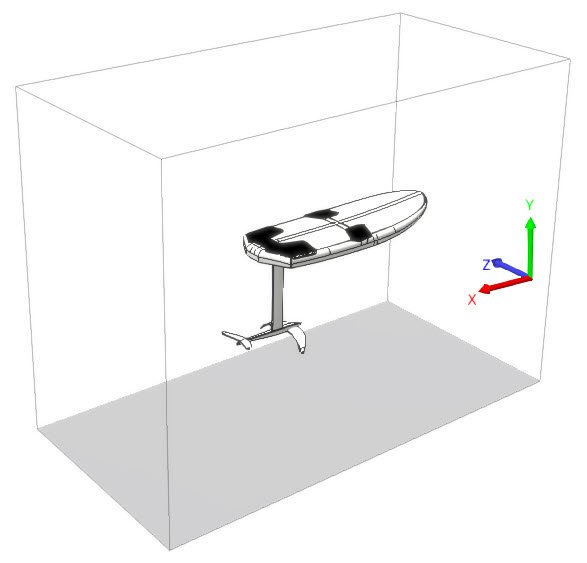
This will automatically create a free-surface study, which can use as a template to define the rest of the specifications. Now under geometry, we will be importing the new geometry. Once that is done, you'll find the geometry imported in a standard lay-out domain size. As this is just for testing (and a little bit of entertaining fun) I have chosen to reduce the domain, to keep the calculations on my laptop in a reasonable scope. I have used a domain of 4, 3, 2 m (X, Y, Z) and changed channel walls to "free-slip". By using free-slip, I don't get any issues in my model with the foil being too close to the bottom., as free-slip makes the assumption as if there is no bottom.
I know that making the domain this small is not the most accurate approach, and that XFlow would advise to use a bigger domain, but this article is not about accuracy. It is about me having fun, and finding out the behaviour ot the hydrofoil and the relation to the center of gravity in XFlow.
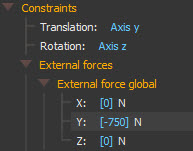 After setting the reference velocity and velocity in the x-direction of 10m/s it is time for the geometry settings. We can include a rigid body dynamics behaviour, so that we can allow translation in the Y-direction, and allow rotation in the Z-direction.
After setting the reference velocity and velocity in the x-direction of 10m/s it is time for the geometry settings. We can include a rigid body dynamics behaviour, so that we can allow translation in the Y-direction, and allow rotation in the Z-direction.
Additionally I need to account for my weight in the Global Y-direction. 75kg is somewhat optimistic after several months of lockdown but it is an assumption.
When running the analysis, initially I got results that showed some translation upwards, and a huge amount of rotation, already after a couple of iterations. A quick check (I should have done earlier) showed me that the Local Center of Gravity was too much to the back.
So on that basis I moved it further forwards, hoping that the big amounts of rotation counter-clockwise would be damped or stopped. The analysis showed that behavior, but after running 1,7 seconds, the board started rotating clockwise and ended up with a huge nose-dive, acting like a strange type of sub-marine.
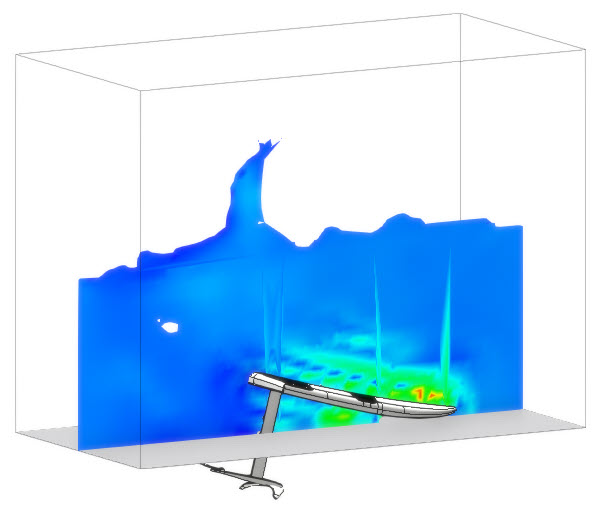
This made me change the Center Of Gravity again and again, hoping I would determine the best position to have the board hydrofoiling above the water, which eventually it did for some seconds... after nosediving again.
After reviewing some youtube videos again, I noticed there are different phases in the hydrofoiling process. First the gaining of the initial speed with the board still touching the water, then a slight more pressure on the backfoot to create a pop, and then eventually the person applying a constant pressure on the frontfoot while shifting his/hers center of gravity further back or forward, all while balancing to create a form of constant.
This is actually where the issue lies. I need to pick a one single appropriate center of gravity value before running the analysis, hoping to find the exact sweet spot of balance, while finding the right balance is a judgement of the person in real life performing this.
All I wanted to do initially is see the board flying under my weight, and all I saw virtually was a rotating nosediving and nervous type of behaviour. This made me think it should really be difficult to get this balancing thing going in real life, which didn't even fully relate to the real situation yet, as I haven't even allowed any rotation over the X-axis. That would even make it even more difficult.
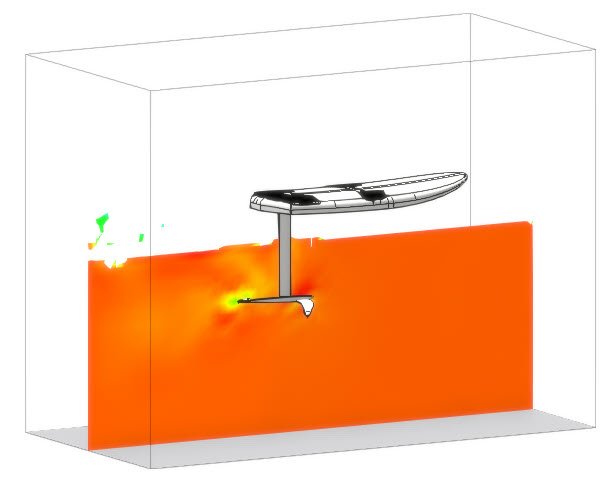
I could overcome this rotating behaviour in XFlow by getting rid of the rotational freedom of the Z-axis completely. This would only show me the board translating vertically while being loaded by my own weight, and wouldn't be half the fun, but I was wondering which kind of result I would get, so I tried it anyway.
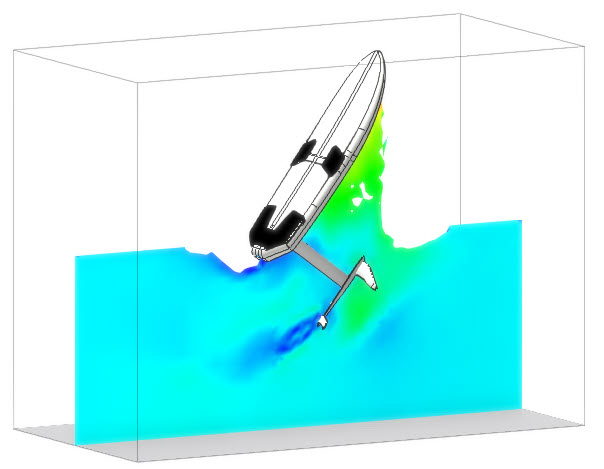
What you see in this picture, is that I have chosen the initial angle of attack on such a way that the hydrofail raises to the surface. The angle of attack in real-life is also determined by the balance and foot pressure you put on the front or back of the board.
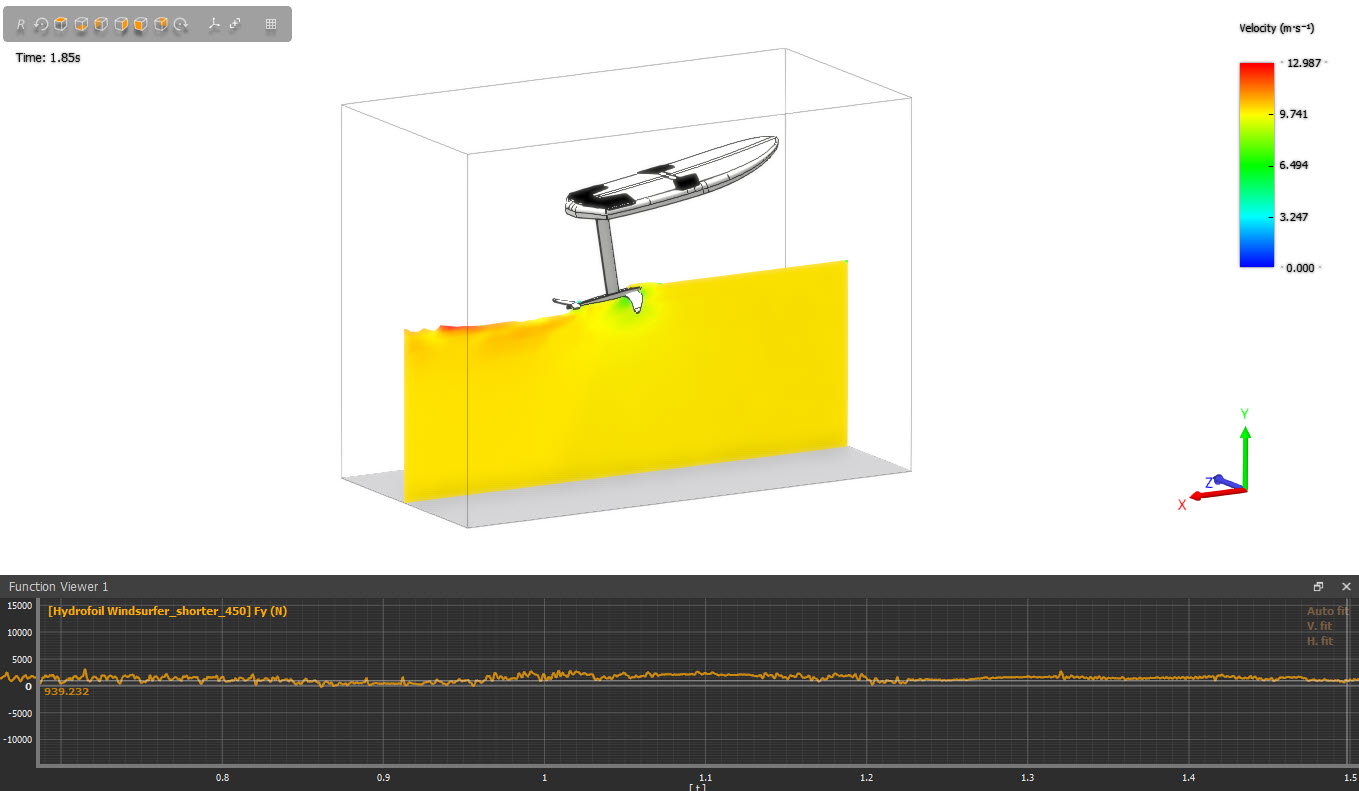
Can't we get any sensible information from these simulations..?
By comparing numerical values for this given angle of attack of 8 degrees, we can measure that the force in the Y direction (lifting force) is approximately 939 N, which is enough to lift me out of the water. This means that we can either go slower, or choose another angle of attack.
Of course if you are in a business of designing hydrofoils, you could determine the amount of drag and optimize that, or try to develop a wing that could suit multiple different conditions. You could even take the F1 route by taking into account a flexible deformation of the wing itself, so at a given high speed the wing would have a lesser angle of attack than at low speeds. These type of analysis would require a huge amount of computational power, FSI Coupling with a structural solver (like Abaqus) and a decent practical test-setup to compare and validate the simulation model.
Conclusion
I have learned from this analysis that there are still be things in real life that are very difficult to balance. If the balance / equilibrium in real life is difficult, it most definitely will be in the virtual world as well.
If you still want to continue with virtual simulation for these specific cases, try to bring it back to something more simpler to get rid of most of the introduced complexity. On this way at least you can get some explainable values out of it. And last but not least, if the virtual world is still too difficult, you can always go back to practical testing.
That is exactly what I will do during my coming holiday. I will probably find out the hard way how difficult driving a hydrofoil windsurfing board in real life is, but I am going to try it anyway. Enjoy!!
Wish you all a great summer holiday!!
P.s. my fails will probably look a little bit like this (leave out the loops as I am really not that brave :-))

TECHNIA Simulation provides top tier FEA, Non-linear, and Advanced Simulation Software, Training, and Consultancy. Our dedicated team of more than 65 Simulation experts across 16 countries advise and support your innovation with a wealth of specialist knowledge and experience.
About TECHNIA- Related news and articles straight to your inbox
- Hints, tips & how-tos
- Thought leadership articles

Helping you find the information you’re looking for. Discover webinars, events, FAQ's, case studies and tutorials.
VIEW HUB